Fetching and Compiling Gazebo. Be sure to source your ROS setupbash script by following the instructions on the ROS installation page.
Baxter In Gazebo

Setup ros and ros-pkg Repositories.
Gazebo ros install. Thank you so much. If installing from source be sure to build the gazebo_XY XY being your desired version branch. In order to load gazebo using ROS you need to have Gazebo and ROS installed.
This ROS package checks out patches and compiles a pre-release version of the Gazebo Project from a WG branch which is based on svn trunk with some local patches and contains wrappers for using Gazebo with ROS. The ROS-wrapped versiong of Gazebo was removed in favor of the system install of Gazebo. We need to install a whole bunch of stuff including the differential drive plugin that will enable us to control the speed of our robot using ROS 2 commands.
This package will update to newer revisions of Gazebo. If installing from source be sure to build the gazebo_XY XY being your desired version branch. Lets begin by installing some packages that we will need to accomplish our objective.
The teams did a great job and it is now possible to install Gazebo and ROS from the debs without working on some kind of nightly build. Build Gazebo ROS Packages. The best way to use Gazebo launch files is to simply inheritinclude the master empty_world launch file located in the gazebo_ros package.
Vcs custom --args checkout gazebo11_foxy. My other question is if there will be any problem with gazebo 50 and ROS indigo. Create a ROS package.
The tutorial only gives instructions for Ubuntu and I am not sure how to adapt this to my system. To build the Gazebo ROS packages you can following the steps as indicated in the section Install from source on Ubuntu from the Installing gazebo_ros_pkgs ROS 2 guide. You can install Gazebo either from source or from pre-build Ubuntu debians.
The local patch provides modifications for performance debug outputs ROS-specific customizations capabilities etc. You can install Gazebo either from source or from pre-build Ubuntu debians. Be sure to source your ROS setupbash script by following the instructions on the ROS installation page.
If you dont want to install everything we highly recommend using ROSDS ROS Development Studio which gives you access to an online environment with ROS already installed. On the rosdep install --from-paths src --ignore-src. You can follow the same steps on your.
It is in gazebo 50 and I have gazebo 222. See rosdep more documentations. Gazebo is also released as an Ubuntu official package.
The less ROS-specific patches are pushed back to the Gazebo repository incrementally as the package evolves. Indeed we are going to use that tool for easiness. The easiest way to setup PX4 simulation with ROS on Ubuntu Linux is to use the standard installation script that can be found at Development Environment on Linux Gazebo with ROS.
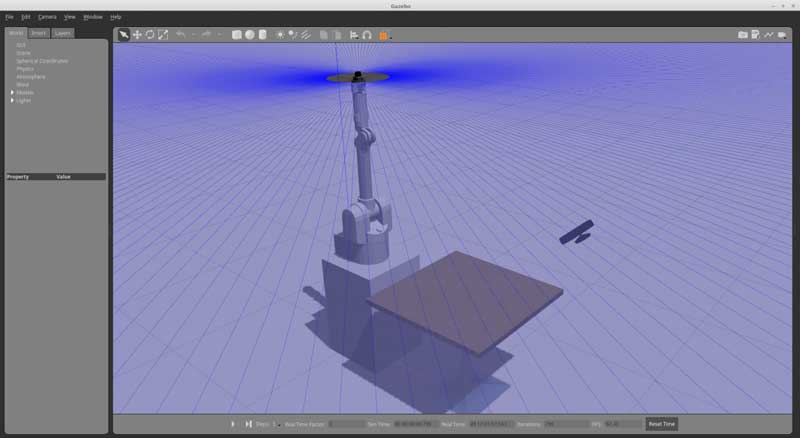
Install ROS Packages. Robotics gazebo ros ros2Gazebo is an open source 3D Dynamic simulator used for robotics development. This may require reconfiguration of your CMake file.
Check which version is available for every distribution. Dont forget to source setupbash script as instructed on the ROS installation page. I am trying to install gazebo_ros_pkgs for ROS2 on MacOS Catalina.
You can install Gazebo either from source or from pre-build packages. It offers a wide of sensors and interfaces as well a. Sudo apt-get install ros-noetic-ros-control sudo apt-get install ros-noetic-ros-controllers sudo apt-get install ros-noetic-gazebo-ros-control Create a ROS Package.
I would like to reinstall gazebo and to have gazebo 50 how can I remove gazebo 222. So here is how to proceed for Ubuntu 1304 as of today check post. Rosmake rosdep rosdep install pr2_gazebo.
A very simple command will do it. Test that stand-alone Gazebo works. The following is an example CMakeListstxt.
To test if everything is properly working just type. Sudo apt-get install ros-kinetic-gazebo9- That command will install all dependencies. PX4 ROS Melodic the Gazebo.
Hi Ros users. HOWEVER for step 5 you will need to use the following instead. Test that stand-alone Gazebo works.
The exact command will be different according to the installation method. A window like the this should appear on your screen. I have managed to install Gazebo 1130 and ROS2 Foxy Fitzroy but I am having trouble installing gazebo_ros_pkgs.
Open a new terminal window and install the packages that will enable you to use ROS 2 to interface with Gazebo. If you are a ROS user please read the tutorial about ROSGazebo installation. Before starting be sure to go through the setup procedures for ROS specified here.
You should install Gazebo 9 or later. This will give the following output. More detail as requested below.
Next install system dependencies for Gazebo using the tool rosdep. The script installs everything you need. Due to the split between Gazebo and ROS the installation of both components has been a nightmare during the summer and even during the fall.
Github Rethinkrobotics Baxter Simulator Gazebo Simulation Interface For The Baxter Research Robot
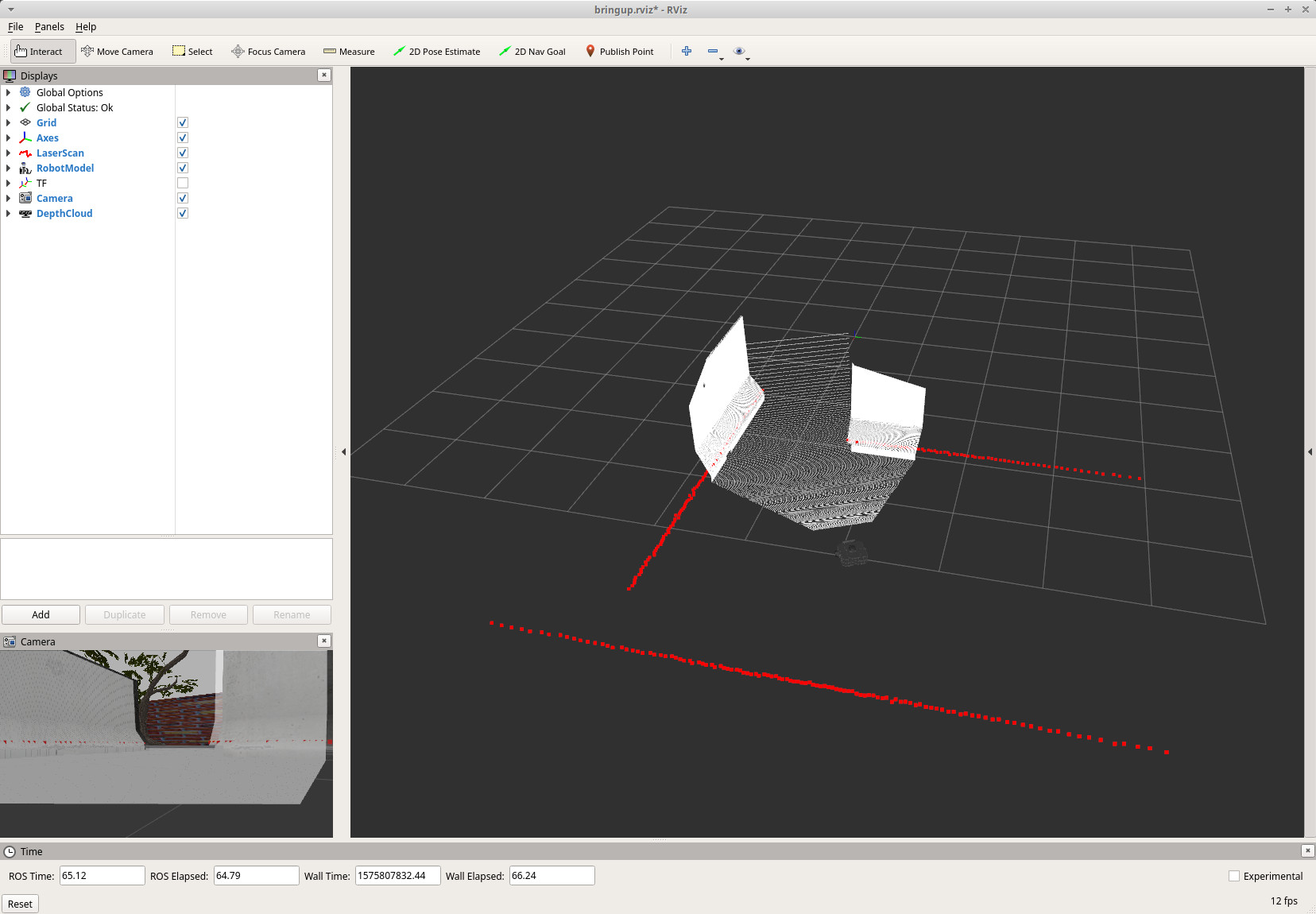
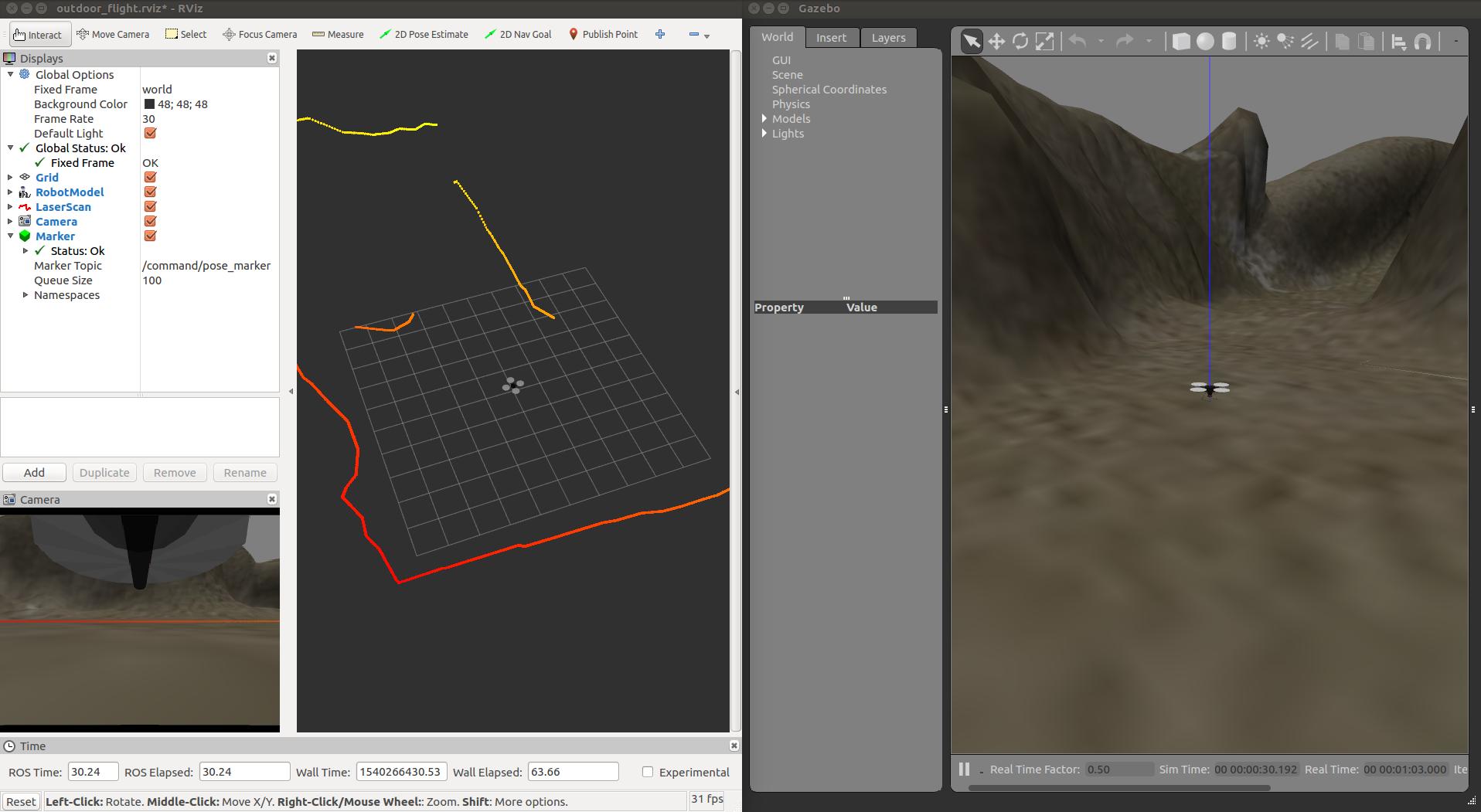
Navigate Gazebo Worlds Nlamprian

How To Simulate A Robot With Gazebo Ros Research Articles Arm Research Arm Community

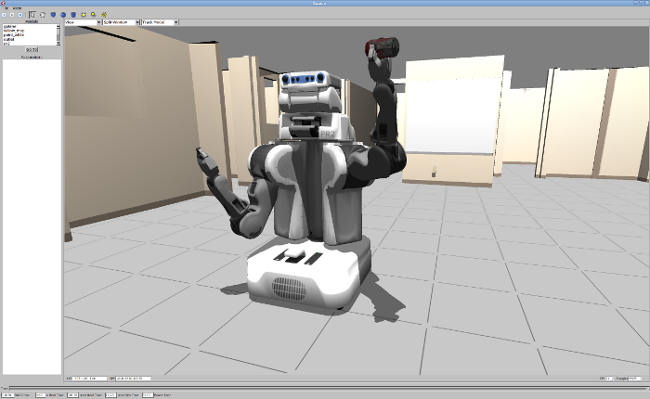
Gazebo Simulation Ros

Navigate Gazebo Worlds Nlamprian

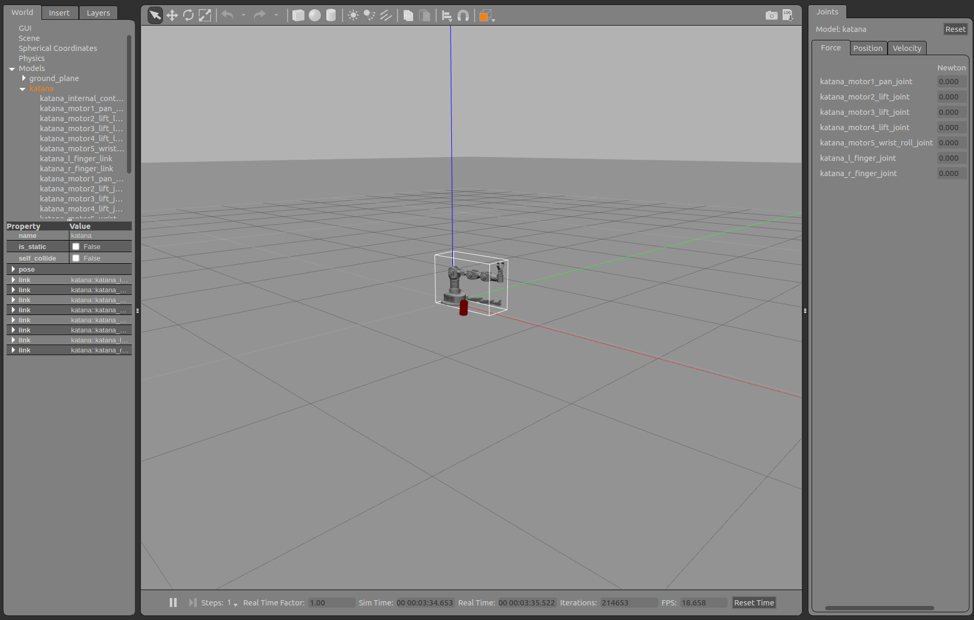
Gazebo Model Editor Ros

Gazebo How To Record A Simulation Ros
All About Gazebo Ros Gazebo 9 The Construct

Gazebo In 5 Mins How To Launch Your First Gazebo World Using Ros The Construct
Github Duthades Car Simulation Ros Gazebo Simulation Of A Car In A World Using Ros And Gazebo
All About Gazebo Ros Gazebo 9 The Construct
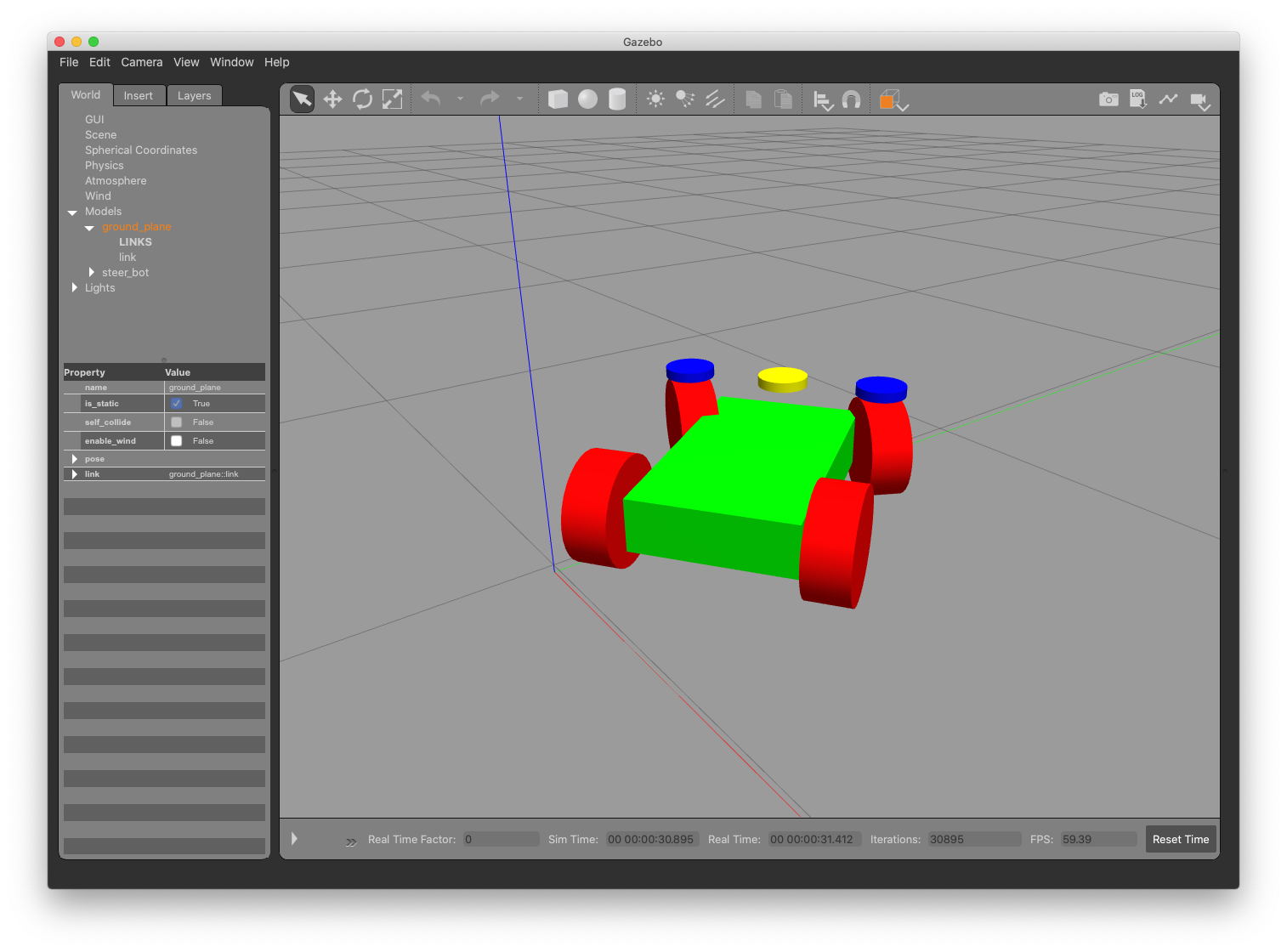
Github Srmainwaring Steer Bot Simulate A Simple Ackermann Steering Vehicle In Gazebo Using Ros Control
Flying With Ros And Hector Hector Quadrotor Package Code Sparks
How To Simulate A Robot With Gazebo Ros Research Articles Arm Research Arm Community
System Ros Gazebo Introduction To Open Source Robotics


Fantastic Podcast From Robohub On Ros With Openroboticsorg 292 Robot Operating System Ros Gazebo With Robot Operating System Operating System System
Using Simulators In Robotics Using The Gazebo Simulator And The Darwin Op Robot Playing Football Robot Geeks Blog Sudo Null It News
Github Jaredmoore Evoros Repository For Evolutionary Optimization Using Ros Gazebo Simulations
Github Duthades Car Simulation Ros Gazebo Simulation Of A Car In A World Using Ros And Gazebo

